■算法简介
据统计,在工业过程控制中,90%以上的控制回路具有PID结构。PID被广泛应用主要是因为它结构简单,综合了系统过去( I ) 、现在( P ) 、未来( D) 三方面信息,对动态过程无需太多的先验知识,鲁棒性强,控制效果一般令人满意, 为广大工程技术人员所熟知。
但是,PID参数的整定一直是令人困扰的问题。1942年Ziegler和Nichols得出了PID参数的工程整定法,简称Z-N整定公式;1953年 Cohen和Caan继承发展了Z-N公式,提出了考虑被控过程时滞大小的 C-C整定公式,这些方法至今仍在工业控制中普遍应用。在常规PID控制参数的整定过程中,往往技巧多于科学,整定费时费力,加之实际系统千差万别,又有滞后、非线性等因素,使得PID参数的整定较为困难,致使许多PID控制器没有能整定到较好状态。
我们根据观察和摸索,结合最新的自动控制理论和工程实践,借助当前高度发达的电子技术,实现了一种新颖的算法模型,能够实现严谨的自整定PID控制。这种控制算法的主要特点是——能够根据运行条件的变化自动调整PID控制参数,无需人为干预,从而最大限度的节省调试和后期管理工作量和难度。
算法主要流程是:
1. 自动辨识被控系统的近似模型;
2. 采取零极点对消的策略计算PID控制器的参数;
3. 根据参数实现工程PID控制器,并进行仿人智能化;
4. 当外部环境产生较大变化时,导致偏差加大,当偏差形态超过一定阈值时,再次启动上述过程,重新设计PID参数,并替代原有的参数;从而实现自整定。
第一步:在辨识被控系统的近似模型时,我们首先获取被控对象的阶跃响应;而后确定使用的近似模型种类(一般为2阶系统加入滞后环节);最后利用特征面积计算法得到系统的近似模型参数。
第二步:在计算PID控制器的参数时,我们首先确定满足控制系统开环控制品质的开环传递函数;然后确定增益裕度和相位裕度;最后根据零极点对消原则计算出实际PID控制器的传递函数参数。(上述计算首先采用haalman法;而后根据T/L的关系动态选择PID参数整定方法(Z-N,C-C,IS);最后综合两者获取更切合实际的PID实际控制参数)
第三步:在实现工程PID控制时,考虑死区、积分分离、工程微分设计、抗饱和等多种策略,实现高效率PID控制算法和输出。
仿人智能化是提升PID控制品质的重要因素,当前采用的智能化策略如下:
√当偏差大时,为了避免过度超调,不加入积分项,而采用倍增的比例项;
√当偏差减少后,逐步加入积分项,减小比例项;
√微分项平均分配到8个时间周期里进行,减少系统过度敏感性;
√死区动态调整,根据稳定裕度增加或者减少;(0.5度~2度之间)
√连续调节而偏差变化很小时,暂停调节,待偏差变化后,重新计算输出;
√非平衡算法,正向偏差时调节积极,负向偏差时调节保守;
√实时记录∑e、 e、∆e、∆e^2,根据4者的大小关系,调节KP,KI,KD参数的大小;
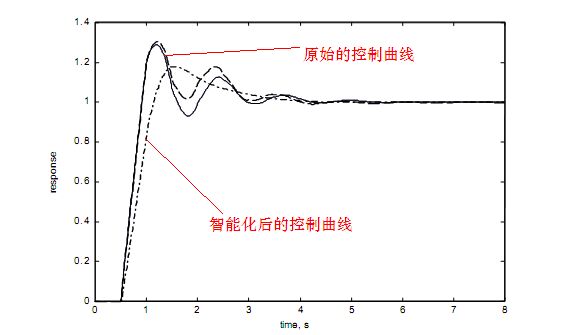
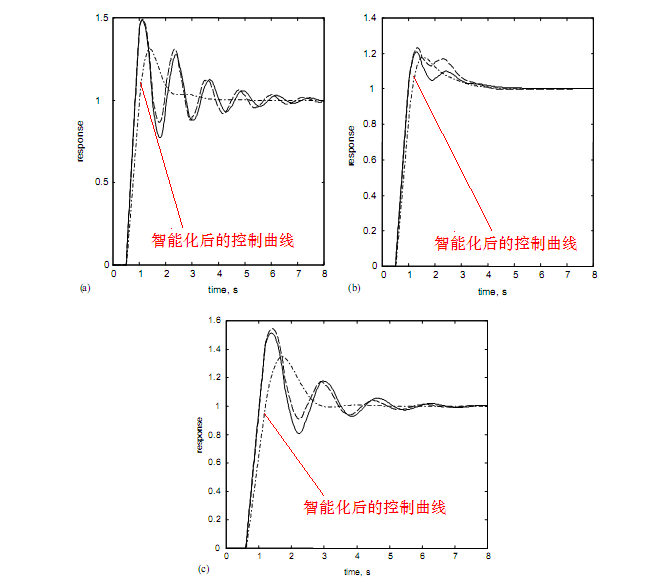
经过上述仿人智能化之后,控制效果得到明显提升,下图中是仿真计算的效果示意,从图中可以清晰看到,无论从调节时间、残差、超调、敏感性上,新的算法都有较为明显的优势。
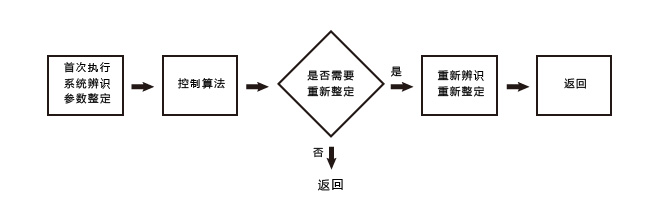
第四步:当外部环境产生较大变化时,偏差与预期的变化效果有明显的差异,当差异超过一定阈值时,启动重新计算PID参数的过程,用新的参数替代原有参数;从而实现参数自整定。
参数自整定的过程与控制算法计算的关系如下图所示:
此项算法属于发明性创新,在国内外没有相类似的思路和实现过程。在供热领域更是属于革新性的使用,极大提高了温度PID控制的品质,在实践中这种控制算法的优势表现得淋漓尽致。